

Ingenieros de la Scuola Superiore Sant´Anna, en la ciudad italiana de Pisa, han iniciado un proyecto llamado Octopus, dentro del marco del Séptimo Programa Marco de la Unión Europea y con un inversión de 10 millones de euros, para desarrollar un pulpo robotizado. Según los investigadores, liderados por la ingeniera Cecilia Laschi, este dispositivo estaría capacitado para recorrer el lecho marino con la misma destreza que uno de estos cefalópodos de ocho patas.
Si se cumplen las previsiones, estaríamos ante el primer robot sin un esqueleto sólido del mundo, ya que estaría hecho completamente a partir de materiales blandos y flexibles. El artículo donde se describe este diseño se titula “Design of a biomimetic robotic octopus arm” y ha sido publicado en el número de marzo de la revista Bioinspiration and Biomimetics.
El gran problema de los robots dirigidos por control remoto bajo el mar es que sus cascos y sus brazos robóticos no pueden llegar bajo ningún concepto a pequeños recovecos rocosos o a intrincadas formaciones coralinas, por lo que las investigaciones en las que están involucrados son limitadas. De hecho, son incapaces de fotografiar ciertos lugares o recoger muestras usadas, por ejemplo, por los oceanógrafos que están buscando pruebas del cambio climático en los arrecifes de coral.
Por ello, los ingenieros se han inspirado en los tentáculos de los pulpos para tratar de dar solución a este problema. Una vez más, la naturaleza sirve como ejemplo, pero se trata de un ejemplo complicado de mimetizar y un auténtico reto ingenieril.
Músculos hidrostatos
El pulpo está compuesto por músculos hidrostatos, el mismo tipo de músculos que los que vemos en nuestra lengua. De esta manera, cuando el pulpo busca algo, sus tentáculos se adelgazan, se estiran y alcanza lugares y huecos casi inaccesibles. Una vez que llega hasta su objetivo, el cefalópodo puede agarrarlo con el extremo de su tentáculo y llevárselo.
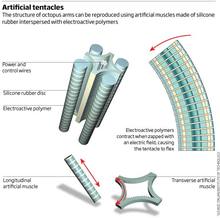
Hacer una réplica de esta estructura muscular y aplicarla a un robot sin que éste tenga una estructura rígida es algo completamente nuevo para la robótica. Cada tentáculo tiene cuatro músculos independientes a lo largo. Estos músculos longitudinales están separados por otros músculos transversales que abarcan el ancho del miembro con un nervio axial que pasa por el centro.
Lo más cerca que han estado los ingenieros de mimetizar algo parecido a lo anteriormente descrito es un tentáculo robotizado que se infla con aire comprimido. Se llamaba “Octarms” y fue desarrollado por varias universidades estadounidenses. Pese a que este diseño se movía correctamente, no podía estrecharse cuando se alargaba y además no era adecuado para trabajar bajo el agua debido a que era, precisamente, inflable.
Laschi y sus colegas del Reino Unido, Suiza, Turquía, Grecia e Israel están probando una nueva tecnología que mimetice de un modo más aproximado un tentáculo.
Cilindros de silicona
En concreto, tratan de proporcionar una caracterización biomecánica a esa estructura muscular. Para ello se están basando en el empleo de cilindros de goma de silicona para los músculos longitudinales, intercalados con otros de un polímero electroactivo, llamado elastómero dieléctrico, que reacciona a las corrientes eléctricas contrayéndose. De esta forma, los ingenieros consiguen los movimientos de torsión en la extremidad, característicos de los pulpos.
Laschi y su equipo confían en que su robot llegue a funcionar. Aunque, según informa la revista New Scientist, los expertos en cefalópodos dudan mucho de que realmente se pueda imitar la increíble capacidad de estos animales para sacar el máximo partido a su fenomenal anatomía. Así, la experta en cefalópodos Claire Little, del Weymouth Sealife Centre, en la ciudad de Dorset, el Reino Unido, advierte que los ingenieros han minusvalorado la magnitud de su proyecto, ya que los pulpos son increíblemente flexibles.
Por el momento, no ha construido el tentáculo, pero ha desarrollado un simulador mecánico que imita las fuerzas que produce el polímero electroactivo. Este simulador, dice Laschi, prueba que los peculiares movimientos del pulpo pueden ser copiados.