
Una nueva iniciativa que ha reunido a nueve grupos de investigación de Estados Unidos, Israel y diversos países de Europa, ha sido puesta en marcha recientemente con el objetivo de imitar a la naturaleza en el desarrollo de robots.
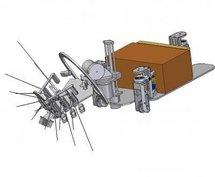
Tomando como modelo el reino animal, los investigadores trabajan actualmente en tecnologías que reproduzcan el tacto, en este caso, el de los bigotes de los roedores. Según un comunicado del Weizmann Institute of Science de Israel, involucrado en esta investigación, el robot con bigotes será capaz de localizar, identificar y capturar objetos en movimiento.
La intención es aplicar el sentido del tacto al diseño de sistemas de inteligencia artificial en un esfuerzo englobado en un proyecto bautizado como BIOTACT. El tacto es muy utilizado por las criaturas nocturnas o que habitan en lugares con escasa iluminación, como medio principal de percepción de información física acerca del entorno que les rodea.
Uso efectivo
Comprender de qué manera las ratas utilizan sus bigotes para explorar su medio y cómo su cerebro procesa la información, permitirá a los ingenieros desarrollar robots que emulen esta misma capacidad para darle un uso efectivo.
El consorcio de investigadores ha descubierto ya, por ejemplo, que los bigotes de las ratas se mueven de aquí para allá repetidamente, acumulando información de lo que les rodea. Los nervios en las bases de los bigotes envían señales al cerebro de lo que los bigotes tocan, y el cerebro procesa dicha información.
Por otro lado, los científicos también han descubierto que la forma que tienen las ratas de utilizar sus bigotes depende del contexto: el aparentemente simple acto de percibir un objeto tridimensional requiere una decodificación diferente de la información en cada una de las tres dimensiones percibidas, con un trabajo conjunto de bigotes y neuronas.
El complejo mecanismo de retroalimentación de información que se activa cuando los bigotes de los redores escudriñan su entorno, y que permite controlar constantemente las señales que las ratas reciben de su medio y modificar sus respuestas en concordancia con ellas, supone un auténtico desafío a la hora de diseñar sistemas artificiales basados en este concepto.
Cálculos y aplicaciones
Para conseguirlo, los investigadores desarrollarán métodos teóricos y cálculos de física teórica y de matemáticas aplicadas para crear modelos de investigación que describan los complicados procesos neuronales que controlan el tacto de los bigotes de los roedores.
Estos modelos estarán basados en observaciones experimentales y se espera den lugar a robots con diversas aplicaciones. Según un comunicado de la Universidad de Sheffield, estos robots servirán tanto para operaciones de búsqueda y rescate a través de escombros y cascotes, en caso de guerras o terremotos, como para detectar minas o para exploraciones planetarias en el espacio.
Asimismo, la tecnología podría ser aprovechada para desarrollar productos domésticos, como aspiradoras que pudieran “sentir” las texturas para llevar a cabo una limpieza óptima.

Por otro lado, la revista Spectrum de la IEEE informa en un artículo acerca del trabajo de los ingenieros del Harvard Microrobitcs Lab, de Estados Unidos, que están desarrollando robots similares a los insectos –en concreto a las moscas- para operaciones de reconocimiento y rescate.
También robots con forma de insectos
Según el profesor Robert Wood, de dicho laboratorio, una vez que los ingenieros consigan acoplarle a los robots con forma de insecto sensores, controles de vuelo y baterías, estas máquinas diminutas quedarán liberadas para que vuelen a lugares donde los humanos no pueden llegar.
De hecho, según Wood, esta es la principal motivación para crear robots móviles: que puedan sustituir al hombre en lugares peligrosos, como el campo de batalla o los derrumbamientos, para encontrar y salvar vidas.
Pero el diseño de un insecto robot es complicado porque la aerodinámica no funciona igual para los aviones que a escala de los insectos. Por ejemplo, a pequeña escala el flujo de aire alrededor de una mosca es mucho más viscoso que alrededor de los pájaros o de un aeroplano. Por eso, para los insectos, volar es muy parecido a estar en el agua.
De cualquier manera, los ingenieros del Harvard Microrobotics Lab han empezado a imitar el increíble movimiento de las alas de los insectos, que comprende la confluencia de diversos sistemas a la vez, como una poderosa musculatura que controla las alas para que éstas generen fuerzas aerodinámicas inestables, de las que depende la maniobrabilidad de los insectos, y unos ojos especialmente afinados para la percepción del movimiento.
Wood afirma que, gracias a cientos de repeticiones, los insectos robóticos han seguido su propio camino evolutivo para conseguir estar cada vez más cerca de la forma de una mosca real. De la biología, estos ingenieros han tomado prestados dos conceptos fundamentales: la proporción del área de ala en correspondencia con la masa del cuerpo y la frecuencia del movimiento de las alas.











Hacer un comentario