
Un equipo de ingenieros de la Universidad de Waterloo, en Canadá, ha desarrollado el primer microrobot volador del mundo capaz de manipular objetos para aplicaciones a microescala.
Este nuevo desarrollo proporcionará a investigadores de muchos campos más control en medios diminutos, permitiéndoles mover de sitio pequeños objetos con mucha más precisión. Manipular objetos de semejante tamaño resulta complejo para los seres humanos habitualmente, por eso la tecnología ahora presentada es tan importante.
La idea partió de Behrad Khamesee, que es el director del Maglev Microrobotics Laboratory, perteneciente a la citada Universidad. Él, junto a un grupo de ingenieros, han conseguido fabricar este primer prototipo volador.
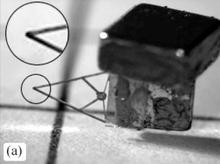
El nanodispositivo desafía la fuerza de la gravedad volando o levitando empujado por un campo magnético. Es capaz de moverse y manipular objetos con una destreza sorprendente gracias a unos imanes adosados a unas micropinzas. El robot es controlado remotamente con un haz de rayo láser.
De alguna manera, su funcionamiento es parecido al que ya se usa en los trenes de levitación. Un tren de levitación magnética, o maglev, es un tren suspendido en el aire por encima de una vía, siendo propulsado hacia adelante por medio de las fuerzas repulsivas y atractivas del magnetismo. Este método tiene el potencial de ser rápido en comparación con otros sistemas de transporte masivos con ruedas.
Micro manipular
Según sus creadores puede ser usado para micromanipular, una técnica que permite posicionar de un modo muy preciso objetos micro. Algunas de las aplicaciones de la micromanipulación son ensamblar componentes, manipular muestras biológicas o incluso llevar a cabo operaciones de microcirugía.
“Hemos desarrollado un microrobot que levita magnéticamente, que es una nueva tecnología para la manipulación usando microrobots voladores”, comenta Khamesee, que lleva años especializado en crear pequeños dispositivos usando la levitación magnética, en un comunicado.
Según sus creadores han sido los primeros en el mundo capaces de fabricar un robot equipado con micropinzas. Gracias a ellas pueden entrar virtualmente en cualquier espacio y operar en un sitio dado gracias a una persona situada lejos de dicho lugar. Esta característica hace que el dispositivo ahora presentado sea muy útil para manipular, por ejemplo, materiales peligrosos o para trabajar en cámaras de vacío o esterilizadas.
La levitación magnética se usa para posicionar el microrobot en un espacio tridimensional, empleando un mecanismo magnético de dirección externo. Este mecanismo controla el campo magnético usando las indicaciones de unos sensores de posición que, precisamente, sitúan al microrobot en el lugar elegido.
Ventajas sobre otros robots
Dado que la fuente de energía usada para moverlo es externa, el dispositivo no tiene que llevarla consigo, lo cual permite que sea mucho más manejable a la hora de maniobrar.
Gracias a la levitación magnética, el microrobot se posiciona solo y fácilmente sobre superficies complejas. Esto le da muchas ventajas sobre otro tipo de robots que caminan o se arrastran para hacer su trabajo. Además, como vuela, evita fricciones y otras fuerzas adherentes.
Otra de sus ventajas, dicen sus creadores, su maniobrabilidad, ya que funciona sin componentes mecánicos como cables o brazos conectados a él.
Los pequeños robots comienzan a ocupar ya un papel importante dentro de las agendas de ingenieros y científicos. En este sentido, hace unas semanas Tendencias 21 anunciaba una nueva investigación que tenía a estos pequeños robots como protagonistas. Ingenieros de la NASA y de la empresa Astrobotic Technology han ideado una serie de pequeños robots destinados a preparar el terreno en la Luna para poder empezar a construir una base permanente en su superficie. En concreto, esos robots se encargarían de levantar unos muros que protegieran las instalaciones del polvo levantado por la actividad de los cohetes que irían y vendrían de la Tierra.











Hacer un comentario