
Investigadores de la Facultad de Informática de la Universidad Politécnica de Madrid (FIUPM), en colaboración con el European Centre for Soft Computing, han desarrollado una técnica de construcción de mapas para robots móviles basada en antónimos, informa la citada Facultad en un comunicado.
Esta técnica se puede aplicar en la mejora de los actuales sistemas de navegación de robots y tiene como ventaja adicional que los sensores de ultrasonido utilizados tienen un coste reducido, están presentes en casi todas las plataformas robóticas, y producen un menor volumen de datos para procesar.
Un robot móvil autónomo es aquel que es capaz de desplazarse por su entorno sin colisionar, sin perderse y recuperándose de eventuales situaciones de desorientación. El trabajo realizado por Sergio Guadarrama, investigador del European Centre for Soft Computing y Antonio Ruiz, profesor de la Facultad de Informática de la Universidad Politécnica de Madrid, y publicado en la revista Information Sciences, se centra en la construcción de mapas, una de las capacidades relacionadas con la navegación autónoma, en la que el robot debe explorar un entorno desconocido (recintos, plantas, edificios, etc.) y confeccionar un mapa del mismo.Para ello, debe percibir los obstáculos usando sus sensores.
Los principales tipos de sensores utilizados son los de visión y rango. Aunque los sensores de visión pueden capturar mucha más información del entorno, en esta investigación se utilizaron sensores de rango por ser poco precisos -en particular, sensores de ultrasonido- para mostrar que el modelo presentado obtiene mapas correctos a partir de datos de entrada escasos e imprecisos.
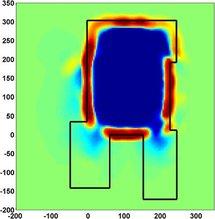
Una vez capturados los rangos, el robot debe traducir tales distancias a obstáculos en su mapa. La imprecisión de los rangos no permite dibujar el mapa mediante rectas, ni siquiera puntos aislados, sino por medio de nubes de puntos. Pero más aún, dado que la ubicación del robot mismo tampoco es conocida con precisión, ni siquiera hay garantía de que cada nube de puntos esté ubicada correctamente, por lo que el mapa obtenido dista mucho del mapa arquitectónico del recinto. En particular, un mismo obstáculo puede ser percibido correctamente desde una posición del robot, pero no serlo desde otra, lo que puede producir informaciones contradictorias –obstáculo y no obstáculo- en un mismo espacio del mapa en construcción. ¿Cuál de ambas es la interpretación correcta?
Explorar espacios desconocidos
La solución está basada en descripciones lingüísticas de los antónimos “libre” y “ocupado” e inspirada en la computación con palabras y en la teoría computacional de percepciones, dos teorías propuestas por L.A. Zadeh, Berkeley, de la Universidad de California. Mientras que otros trabajos publicados consideran los obstáculos y los espacios libres conceptos complementarios, esta investigación no los considera de ese modo, sino que asume que los obstáculos y los espacios libres forman un par de antónimos en vez de ser complementarios.
Así, por ejemplo, si un cierto espacio está ocupado podemos inferir que no está libre, pero si un cierto espacio no está ocupado no podemos inferir que está libre, sino que podría ser desconocido o ambiguo, ya que el robot tiene una información limitada de su entorno.
También se representan explícitamente las contradicciones entre “libre” y “ocupado”. Así, el robot es capaz de distinguir entre dos tipos de espacios desconocidos: los desconocidos por contradicción y los desconocidos por inexplorados, lo que le llevaría a navegar con cuidado en los primeros y a explorar los segundos.
El mapa se construye mediante reglas lingüísticas del estilo “Si la distancia medida es corta, entonces asignar un grado de confianza alto a la medida”, o bien “Si un obstáculo ha sido percibido varias veces, entonces incrementar la confianza en su presencia”, siendo “corta”, “alto” y “varias” conjuntos difusos, según la teoría de conjuntos difusos (también llamados conjuntos borrosos). Las contradicciones se resuelven confiando más en los rangos más cortos y combinando múltiples medidas.
Los resultados alcanzados, que se han comparado con los obtenidos a través de otros métodos, muestran que los mapas obtenidos con esta técnica capturan mejor la forma de las paredes y la de los espacios libres y contienen menos errores por capturas del sensor incorrectas, lo que abre posibilidades de mejora a los actuales sistemas de navegación autónoma de robots.
















Hacer un comentario