La asombrosa habilidad de las larvas de libélula para atrapar presas en fracciones de segundo mediante un sistema de catapulta ha inspirado el desarrollo de nuevos robots, que demuestran excelentes niveles de precisión, eficiencia y dinamismo. La innovación es el resultado de un reciente estudio de científicos de la Universidad de Kiel, en Alemania, y podría abrir un nuevo camino en el campo de la robótica bioinspirada.
Los investigadores creían desde hace décadas que la presión hidráulica era la causa principal del mecanismo de catapulta que permite a las libélulas cazar a sus presas en un abrir y cerrar de ojos, mediante piezas bucales que se impulsan súbitamente hacia adelante. Ahora, los científicos alemanes han descifrado por completo el principio funcional biomecánico que sustenta a esta acción, y que ha permitido desarrollar nuevos robots bioinspirados.
Según una nota de prensa, los estudios efectuados en el marco de una investigación publicada en la revista Science Robotics permiten concluir que el eje del mecanismo empleado por las libélulas es una reserva energética extra acumulada en sus músculos, que les permite accionar el sistema de catapulta con una potencia superior a la que podrían obtener en condiciones normales.
El mecanismo que posee el insecto le permite gestionar una catapulta doble, a través de una estructura elástica interna ubicada en su cabeza y que es sostenida por un músculo, a modo de un resorte bajo tensión. Allí se acumula la energía complementaria indicada previamente.
Naturaleza que inspira
Los especialistas alemanes indicaron que este tipo de sistemas se encuentra muy extendido en el reino animal, pudiendo hallarse en variadas especies como los saltamontes, las cigarras o los camarones mantis. Sin embargo, la característica particular que muestran las larvas de libélula es la presencia de un sistema sincronizado de catapulta dual, que nunca antes se había identificado en la naturaleza.
El sistema de control de dos catapultas de forma independiente ha inspirado a los científicos para crear nuevos robots particularmente ágiles y eficientes. El mecanismo robótico bioinspirado facilita un mejor control de determinados procesos como el salto, donde los sistemas de control y estabilización deben ser pequeños y livianos. Las condiciones creadas mejoran el rendimiento y la eficiencia de este tipo de robots.
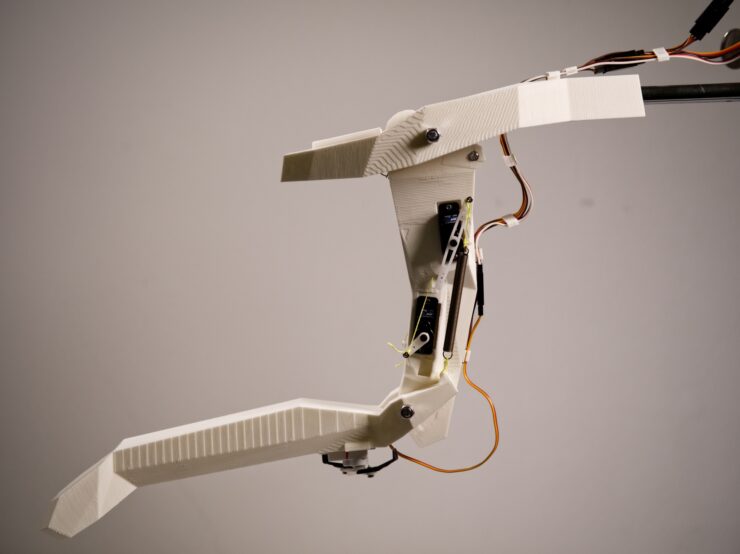
Los científicos probaron su hipótesis mediante la fabricación de un robot utilizando impresión 3D. El robot bioinspirado logra la eficiencia buscada, mediante una estructura especial que, además de su valor funcional, ha proporcionado a los investigadores una visión más detallada del principio biológico operativo que llevan adelante las larvas de libélula.
Un futuro sin límites
Los robots bioinspirados prometen revolucionar el campo tecnológico, y ya se están aplicando en muchos sectores de la industria. De esta forma, la combinación entre los conocimientos biológicos requeridos para identificar los mecanismos naturales y la experiencia técnica de los expertos en robótica, permite pensar que estos diseños serán algo cotidiano en las próximas décadas.
Hacia el futuro, los especialistas creen que la comprensión de la biomecánica del sistema de catapulta dual se podrá utilizar para controlar la dirección y el empuje de nuevos sistemas robóticos de mayor dinamismo y precisión de movimientos, con un amplio rango de aplicaciones en todo tipo de actividades industriales y tecnológicas. ¿Tendrán límites los robots bioinspirados y las tecnologías basadas en los sistemas biológicos?
Referencia
A controllable dual-catapult system inspired by the biomechanics of the dragonfly larvae’s predatory strike. Büsse, S., Koehnsen A., Rajabi H., Gorb S.N. Science Robotics (2021).DOI:https://doi.org/10.1126/scirobotics.abc8170
Video: Universidad de Kiel.
Foto:
Los científicos de la Universidad de Kiel han adaptado los principios funcionales biomecánicos de la máscara labial de las libélulas para aplicarlo a la robótica. Crédito: Alexander Köhnsen, Universidad de Kiel.
















Hacer un comentario